GENERALITES
PREAMBULE
La gestion de l'adhérence consiste à :
du véhicule dans différentes phases de roulage. Les différentes phases de roulage sont : l'accélération, le freinage, le changement de direction
Gérer l'adhérence permet de :
| GESTION DE L'ADHERENCE | NOM DE LA FONCTION | DESCRIPTION |
|
Antiblocage de roues (ABS) |
|
|
Antipatinage (BASR) |
|
|
Contrôle dynamique de stabilité (ESP) |
|
SYNOPTIQUE
Le tableau ci dessous recense les fonctions réalisées par les fonctions de bases.
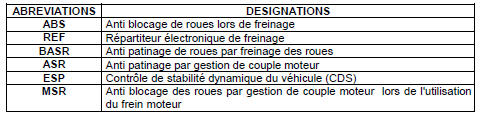
ANTIBLOCAGE DES ROUES (ABS)
La fonction antiblocage des roues évite le blocage des roues avant et arrière lors d'un freinage. La stabilité directionnelle et la manoeuvrabilité du véhicule sont ainsi conservées. La distance de freinage est optimisée. Le système gère la pression de freinage appliqué aux étriers de frein ou aux cylindres de roues, il gère indépendamment chaque roue pour éviter qu'elle ne se bloque.
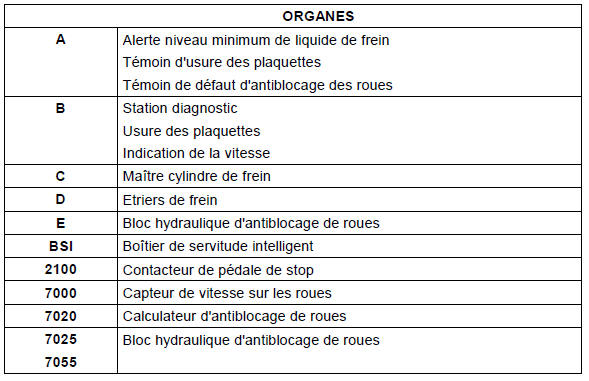
Synoptique
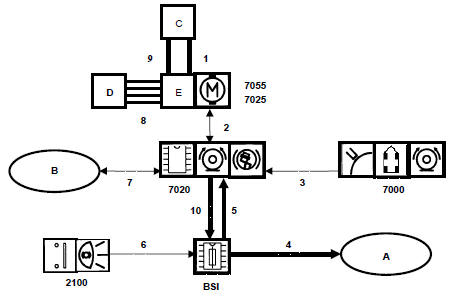
Antiblocage des roues (ABS)
|
LIAISONS |
||
| N° DE LIAISON |
SIGNAL |
NATURE DU SIGNAL |
| 1 | Demande de freinage par le conducteur (circuit avant) | Hydraulique |
| 2 | Commande du moteur électrique de pompe hydraulique Commande des électrovannes |
Filaire |
| 3 | Commande des électrovannes | Modulé en fréquence |
| 4 | Information niveau minimum de liquide de frein. Information d'usure des plaquettes avant. Information défaut de fonctionnement de l'antiblocage de roues et de la fonction REF |
Réseau Van carrosserie |
| 5 | Etat du contacteur de pédale de freins | Réseau Can |
| 6 | Position de la pédale de freins | Filaire |
| 7 | Diagnostic du calculateur. Usure des plaquettes avant. Indication vitesse véhicule 5 tops par mètre |
Filaire |
| 8 | Pression de freinage asservie vers les étriers de freins | Hydraulique |
| 9 | Demande de freinage par le conducteur (circuit arrière) | Hydraulique |
| 10 | Demande d’allumage de la lampe défaut ABS. Demande d’allumage de la lampe défaut REF |
|
ANTIPATINAGE DES ROUES (BASR)
La fonction antipatinage des roues évite le patinage des roues motrices lors des accélérations. La stabilité directionnelle et la manoeuvrabilité du véhicule sont ainsi conservées. Le système freine indépendamment chaque roue motrice pour éviter qu'elle ne patine.
Synoptique
Le synoptique de la fonction BASR est identique au synoptique de la fonction ABS, seul le logiciel du calculateur est différent.
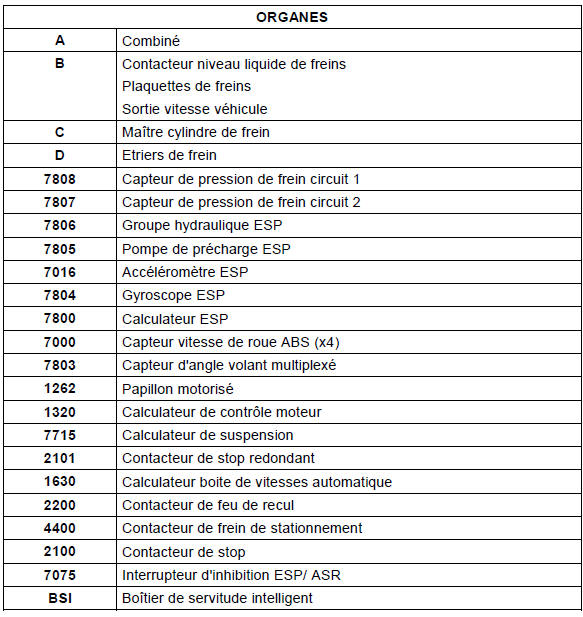
CONTROLE DYNAMIQUE DE STABILITE (ESP)
Synoptique
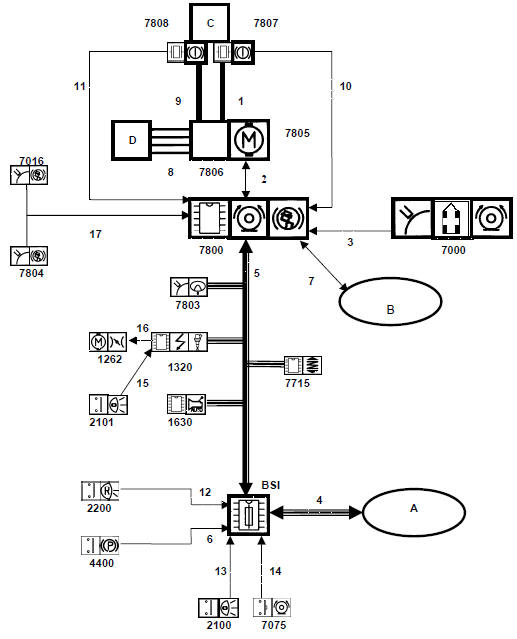
Controle dynamique de stabilite (ESP)
Nota : La fonction antipatinage de roues quand elle est incluse dans un ESP intègre la gestion du couple moteur, en plus de la gestion par freinage, de la roue qui patine.
La fonction contrôle dynamique de stabilité optimise la trajectoire du véhicule. La fonction se décompose en deux opérations :
Nécessité d'un contrôle dynamique de stabilité
En virage, pour améliorer la trajectoire du véhicule, il peut être intéressant d'assister le conducteur en agissant sur les organes du véhicule.
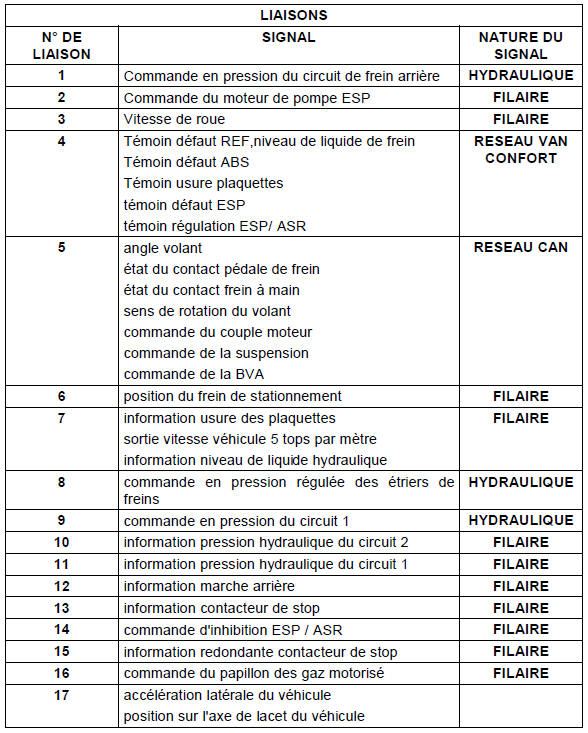
Asservissement
Un capteur d'angle volant informe le calculateur de la trajectoire souhaitée.
Un accéléromètre et un gyroscope informent le calculateur de la trajectoire réalisée.
Le calculateur calcule la différence entre les deux trajectoires. En fonction de cette différence et de lois actives qu'il possède en mémoire, le calculateur détermine l'action à entreprendre pour que la trajectoire réalisée se rapproche le plus de la trajectoire souhaitée.
Activation Désactivation
Les fonctions ASR et ESP peuvent être désactivées par le conducteur par l'appui sur un bouton poussoir à impulsion si :
Les fonctions ASR et ESP sont réactivées automatiquement quand la vitesse dépasse 30 Km/h
Calcul des informations cinématiques
Le tableau si dessous indique les données entrant dans le calculateur et les données en sortant ainsi que leurs destinataires.
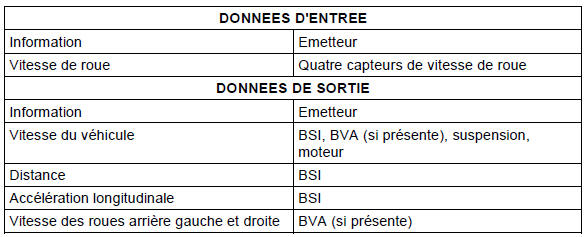
Calcul de la vitesse du véhicule
La vitesse du véhicule est déterminée à partir de la moyenne arithmétique des roues avant motrices. La précision de ce calcul est de ± 2,5%.
Calcul de la distance
La distance est calculée à partir de l'information obtenue grâce aux capteurs des deux roues arrière.
Calcul de l'accélération longitudinale
L'accélération longitudinale est calculée à partir des capteurs montés sur les roues non motrice.
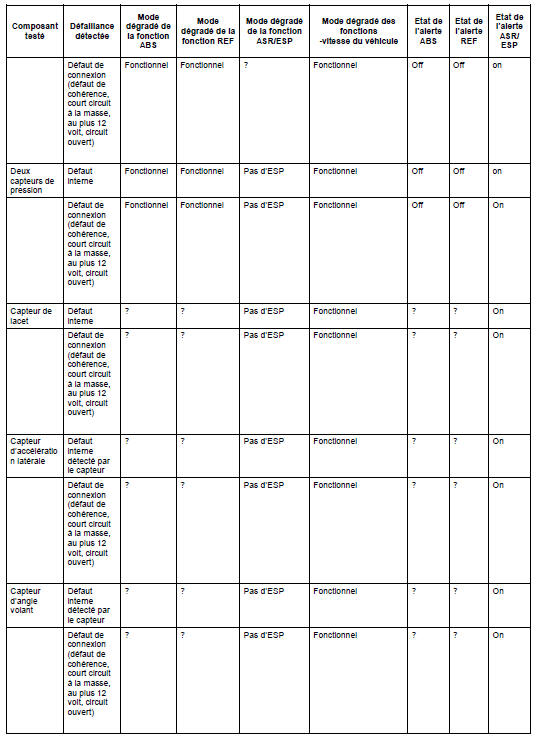
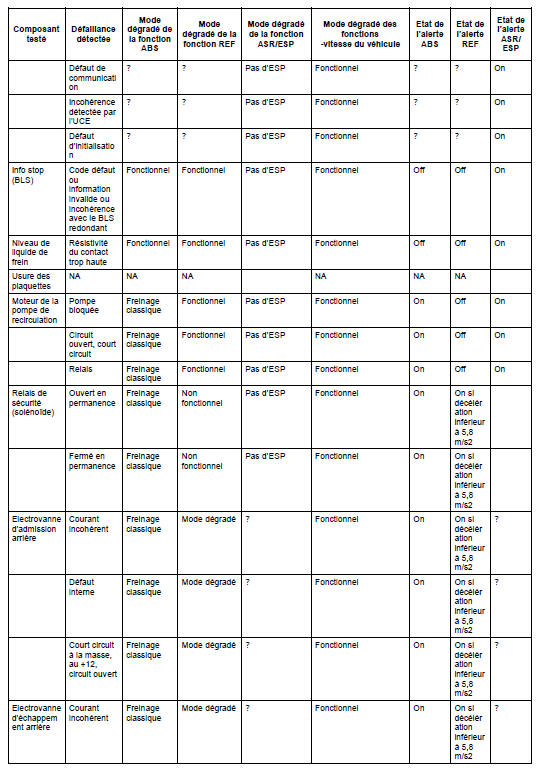
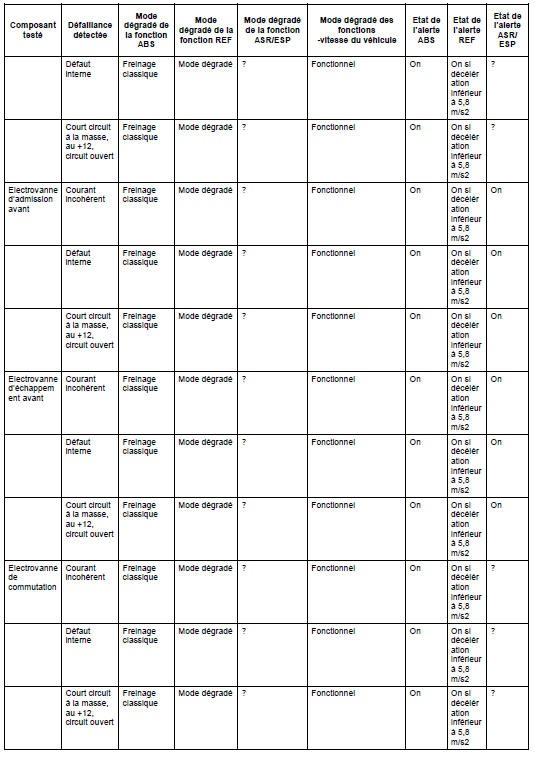
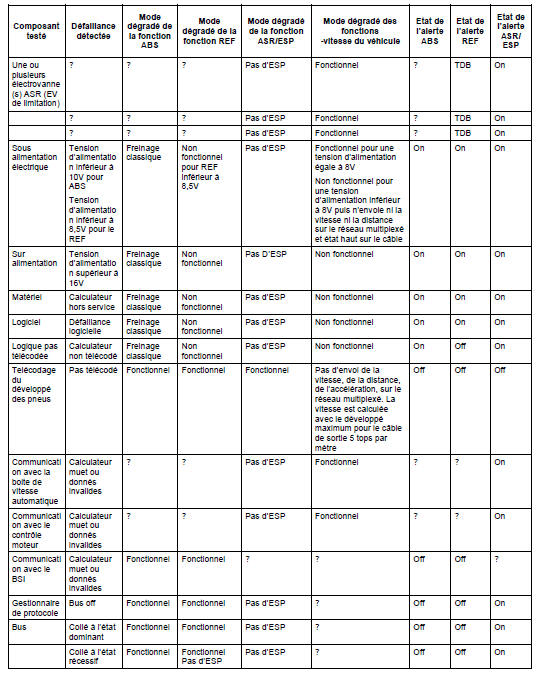
OPERATIONS APRES VENTE
Modes dégradés
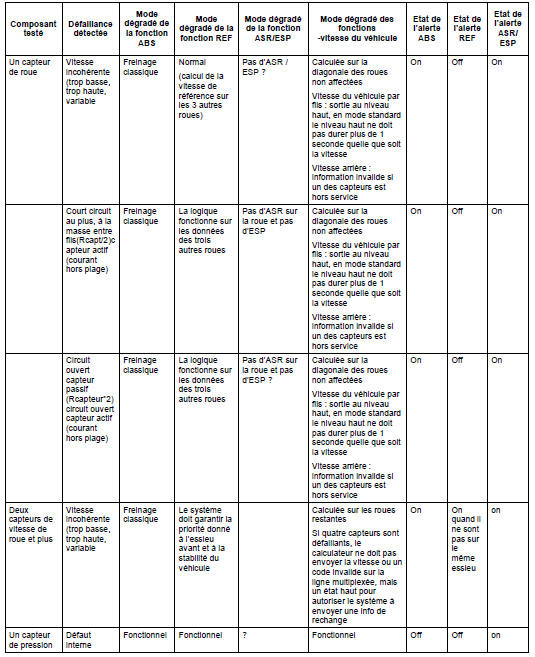
Identification de la roue de secours
Dès qu’une roue est reconnue de manière durable comme ayant un développement différent de plus de 5% par rapport aux autres roues, la roue de secours est identifiée. Le calculateur doit alors corrigé les informations qu’il délivre. Les régulations d’ABS et de REF doivent être totalement opérationnelles jusqu’à une différence de développement de 12% entre la roue de secours et les autres roues. Pour des différences supérieures le système passe en mode dégradé.
Mode d’urgence du REF
Le système doit garantir la priorité donnée aux roues avant, à la stabilité du véhicule, optimiser la pression de freinage des roues arrière à chaque fois que c’est possible et imposer un fonctionnement "select low".
 Schema electrique air bag
Schema electrique air bagFixations «Isofix»
Votre véhicule a été homologué suivant la nouvelle réglementation ISOFIX.
Les places arrière latérales et le siège passager avant sont équipés d’ancrages
ISOFIX réglementaires.
Fixations «Isofix»
À l ...
Fonction bruiteur oubli des feux
Synoptique : fonction bruiteur oubli des feux
Fonction bruiteur oubli des feux
Légende :
flèche triple : liaison multiplexée,
flèche simple : liaison filaire
Conditions d’activation du bruiteur
Description fonctionnelle : fonction bruiteur oubl ...
Procédures de secours
Perte des clés, de la
télécommande, de la clé
électronique
Se rendre dans le réseau CITROËN avec le
certificat d'immatriculation du véhicule, une pièce
d'identité et si possible, l'étiquette comportant le
code des clés.
Le réseau CITROËN pourra récupérer le code
...
